(譯)Sealed In Coil 模式(自保迴路)
最基本的梯形邏輯編程模式是自保迴路。該模式是記住PLC中狀態的基礎。該模式由觸發條件和線圈組成,線圈通電後,線圈的觸點圍繞觸發條件分支,以“自保”:
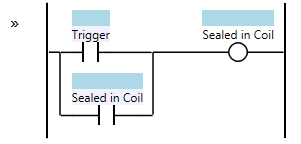
“觸發”觸點可以替換為所需的任何邏輯。僅僅是導致線圈通電的條件。自保部分始終是線圈本身的常開(NO)觸點。這是一個示例時序圖:
您可能會質疑這種模式的實用性,因為在線圈通電後,它永遠不會關閉!這有什麼用?好吧,實際上這個線圈永遠不會關閉是不對的。如果PLC斷電,或者您在PLC上進行了Hard Reset,則線圈將恢復為斷電(關閉)狀態。這意味著“自保迴路”模式對於記住自程序運行以來至少已發生過某件事非常有用。

您通常會在邏輯中使用該模式來“引用”或“復歸”機器。假設您有一個連接到滾珠螺桿的馬達。馬達旋轉時,滾珠螺桿上的滑台沿軸移動。通常,我們在馬達軸上安裝增量編碼器,以便PLC(或伺服驅動器)可以跟踪位置。但是,由於在前進或後退時只能得到一連串的脈衝,因此控制系統在將軸參考(也稱為原點)到已知位置之前,不知道絕對位置。為此,我們在軸上添加了“cam sensor”。如果我們在主cam的左側,則傳感器將關閉,如果我們在其右側,則傳感器將打開。機器啟動時,必須知道它處於“未復歸狀態”。當我們處於這種狀態時,通常會等待操作員按下主螢幕按鈕以啟動復歸程序。復歸程序開始後,如果主cam關閉,然後馬達將開始轉動,以將滑台向右移動,直到原點cam sensor觸發;如果原點cam sensor 觸發,則它將開始反方向旋轉,直到關閉。這樣,機器就可以找到其原點或參考位置。
一旦機器復歸了,就需要記住該狀態。由於每次打開機器時僅需要復歸一次,因此,通常採用自保迴路的方法。
Written with StackEdit.
沒有留言:
張貼留言